Les êtres humains adultes valides sont des animaux qui se déplacent usuellement sur deux pieds, à des distances petites ou moyennes, sur des terrains plats ou à pente peu élevée ; ou occasionnellement à quatre pattes pour escalader une grande pente. Ils peuvent aussi nager sur l’eau, et sauter en l’air à une hauteur d’une fraction de leur taille : trop lourds et inadaptés pour voler par leurs propres moyens, ils se sont longtemps contentés d’en rêver. Nous nous intéressons ici aux possibilités d’une population de gens, sauf des personnes à mobilité réduite nécessitant un traitement spécial.
Les plus imaginatifs d’entre eux leur ont proposé de nombreux moyens de locomotion ou de transport, pour leur permettre, soit individuellement, soit en groupes, de franchir sans trop de fatigue de grandes distances, de grimper à une grande hauteur, de franchir des obstacles, et enfin de voler.
De tels moyens « finalisés », conçus et créés pour atteindre un but « intéressant des êtres humains », sont des exemples d’objets artificiels.
Les êtres humains sont aussi des animaux sociaux qui aspirent à vivre ensemble en société, ayant constaté que cette situation augmentait leur capacité d’action et leur pouvoir sur la nature. La nécessité de vivre ensemble sans s’entre-tuer et de se protéger de leurs ennemis les a conduits à imaginer des types de sociétés en vue d’atteindre ce but humain : autres exemples d’objets ou plutôt systèmes artificiels.
Mais revenons à notre premier exemple simple. Aux yeux d’un physicien, un homme adulte qui marche est un pendule composé : un métronome ambulant, muni de deux pieds, qui tourne autour d’un pied puis l’autre, à la voûte plantaire agrandie par l’évolution, pour balancer son nombril autour d’une verticale. En utilisant son énergie pour s’écarter de l’équilibre où il était immobile, il a transmis au balancier de cette horloge une énergie cinétique amorçant des oscillations dont il ne lui reste plus qu’à entretenir l’amplitude à sa base par un pas répétitif. Sa période propre, c’est-à-dire le temps qu’il met pour avancer le pied droit et s’y appuyer pour avancer le pied gauche et se retrouver dans la même situation en ayant progressé de deux pas, le tout avec un minimum de fatigue et de dépense d’énergie, est d’environ deux secondes : elle mesure sa « résonance interne », à peu près dans le sens où semble l’entendre le philosophe qui se sert de cette expression, car en même temps que l’accumulation initiale d’énergie pour remplir une fonction d’horloge, l’homme remplit une fonction de déplacement en changeant de pied. Sa masse active simultanément deux potentiels sur la Terre qui tourne sur elle-même : la gravitation et l’inertie. Ses ancêtres très lointains accomplissaient ces fonctions à l’aide de pseudopodes, déformations de leur contour corporel, transformées par évolution en quatre membres inférieurs dont ils ont conservé les deux postérieurs pour se déplacer ; choix plus heureux que celui d’autres animaux, comme l’ont chanté les Mexicains révolutionnaires, deux fois comme le coq de Saint Pierre :
La cucaracha, la cucaracha Le cafard, le cafard,
ya no puede caminar ne peut pas marcher,
Porque no tiene, porque le falta Car il lui manque, car il n’a plus
los paticas de detraz les petites pattes de derrière
Si l’homme fait en chaque demi-période d’une seconde un pas de 80 centimètres, il marche à la vitesse de 0,80 mètre par seconde : c’est la vitesse à laquelle il lui est proposé, dans les pays d’Europe de l’Est, de monter sur un escalator ou un trottoir roulant, en tenant une main courante synchronisée pour ne pas perdre l’équilibre. En Europe de l’Ouest et en Amérique, la vitesse est limitée à 0,70 mètre par seconde.
Cette vitesse limite est imposée à l’objet artificiel pour qu’il fonctionne en satisfaisant au but humain qu’il lui a été proposé de réaliser : transporter des gens, tels que l’inventeur les a imaginés, un peu moins lestes à l’ouest.
Si au lieu de monter sur un trottoir roulant à son extrémité dans le sens de la marche, l’usager doit monter sur une plateforme mobile qui défile devant lui, comme un train qui vient de démarrer, il y arrive en suivant la marche du train et en saisissant une poignée pour ne pas tomber : jusqu’à 1 mètre par seconde sans grand danger. Mais si le quai est encombré sur toute sa longueur par des usagers qui attendent, ils ne pourront monter sur la plateforme que perpendiculairement à sa marche : des expériences réalisées dans les années 1960 montrent que la vitesse limite à laquelle un public nombreux peut monter dans ces conditions est réduite à 0,35 mètre par seconde, et qu’ il « vaut mieux » se saisir d’un appui sur la plateforme mobile. C’est la vitesse à laquelle on peut monter dans une télécabine de montagne qui défile dans une station d’accès sans s’arrêter, caractéristique imposée à ce moyen de transport.
La rue de l’avenir
Nous sommes en 1900 : la Rue de l’Avenir est le nom qui a été donné au trottoir roulant utilisé par les visiteurs de l’Exposition Universelle de Paris (fig 1) : composé de deux plateformes mobiles et une fixe parallèles, il parcourt de l’esplanade des Invalides au Champ de Mars un circuit de 3,5 kilomètres en une demi-heure en reliant 9 stations.
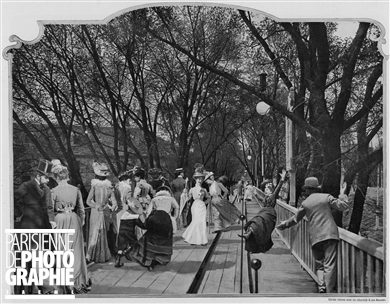 Fig1. Trottoir roulant de l’Exposition de 1900 à Paris.
Fig1. Trottoir roulant de l’Exposition de 1900 à Paris.
Sur un film tourné par Thomas Edison, on voit les usagers passer aisément d’un trottoir fixe non encombré à une première plateforme à la vitese relative plutôt élevée d’un mètre par seconde (4 kilomètres à l’heure), en s’appuyant sur un poteau vertical comme ceux qu’on voit sur la figure 1 ; puis marcher d’une plateforme à la seconde à cette vitesse relative d’un mètre par seconde, pour atteindre sur la deuxième plateforme une vitesse double de 2 mètres par seconde ou 8 kilomètres à l’heure. Beaucoup d’hommes franchissent l’espace sans chercher un appui.
Mais la figure 1 montre une femme qui perd l’équilibre en voulant monter sur le premier trottoir mobile, et un homme qui descendant sur le trottoir fixe est précipité vers la barrière par sa vitesse d’un mètre par seconde.
Le trottoir roulant est un objet qui a été conçu en 1880 par les inventeurs américains Schmidt et Silsbee, et réalisé pour la première fois à l’exposition Universelle de Chicago en 1893, dans le but d’éviter une marche à pied fatigante à un public nombreux dans un espace où il est amené à effectuer de nombreux déplacements. Dans cette réalisation représentée figure 2, l’usager avait la faculté de rester debout, ou de s’asseoir sur un banc à deux places installé sur la plateforme roulante : ce détail a son importance. Les bancs étaient retournés aux deux extrémités du trottoir progressivement sur deux plateformes tournantes de grand rayon.
Dans les espaces urbains où l’activité est dense, ou dans les aéroports qui desservent le monde entier, fréquentés par un public nombreux, chargé de bagages, astreint à parcourir de longs couloirs obligatoires en raison de la dimension et du nombre des avions, le besoin s’est fait sentir de mettre à la disposition de ce public des trottoirs roulants plus rapides.
Un trottoir roulant accéléré matérialise le chemin parcouru à vitesse variable par l’usager, identifié ici à un véhicule se transportant lui-même : on accélère son parcours en allongeant le plancher sous ses pieds, et on le décélère en ramenant le plancher à sa longueur primitive ; dans le parcours initial accéléré on multiplie la vitesse originale de 0,8 mètre par seconde de cette route active par 5, soit 4 mètres par seconde ou 15 kilomètres à l’heure, en modifiant sa forme et sa motorisation, et on la redivise par 5 sur le parcours final décéléré, de telle sorte que la vitesse et l’accélération changeant à chaque position sur la route, la distance qui sépare des usagers successifs est modifiée par le système : elle augmente dans les parcours accélérés et diminue dans les parcours décélérés.
 Fig 2. Trottoir roulant de l’Exposition de Chicago en 1893
Fig 2. Trottoir roulant de l’Exposition de Chicago en 1893
De nombreux inventeurs imaginatifs ont réussi à en faire fonctionner : ils se sont fixés le but matériel qu’on vient de décrire et ont réalisé de belles mécaniques de précision, synchronisées avec une main courante servant d’appui à une charge éventuelle. Ces systèmes fonctionnent très bien en transportant un objet d’assise stable, qu’on dépose à l’entrée en le fixant à la main courante et qu’on détache et retire à la sortie, ou à titre d’essai une troupe de militaires disciplinés agissant comme des robots. Mais ils se révèlent difficiles à utiliser dans une exploitation ouverte à un public ordinaire : l’inventeur demande alors à l’usager de « jouer le jeu » en restant immobile pour être synchronisé, de ne pas ajouter sa vitesse à celle de la route. En agissant ainsi, il s’est fixé comme but de transporter non pas un public en chair et en os, qui bouge pendant le trajet, mais un robot programmé pour « jouer le jeu » : les incidents et les accidents se multiplient, le diable se manifeste dans les innombrables détails de la vie qui changent la distance séparant des gens qui bougent, ils ne se retrouvent pas à l’arrivée avec la même distance entre eux, d’où des bousculades, des accidents, et la « disponibilité » du système tombe au dessous de la limite tolérable. La précision imposée par le créateur à sa mécanique pour cet emploi robotisé se révèle inadaptée au but de transporter une population d’humains ordinaires.
Le trottoir roulant accéléré le plus perfectionné construit, le TTR utilisé à la gare Montparnasse à Paris de 2002 à 2009 a atteint la vitesse en service record de 11 kilomètres à l’heure (3 mètres par seconde), mais on a dû la réduire à 9 kilomètres à l’heure en raison des accidents multiples, et il a été finalement abandonné parce que sa disponibilité s’est révélée insuffisante (60%) de ce fait : trop d’accidents, de chocs, de chutes.
L’objet artificiel conçu et créé pour atteindre un but tel que le concepteur-créateur se l’était représenté et fixé, s’est révélé une création illusoire : l’imagination des concepteurs a engendré ce que nous avons nommé une illusion créatrice. Le système a bien fonctionné, mais le but recherché : transporter des humains, défini trop sommairement, n’a pas été atteint ; le « schème hylémorphique » aristotélicien, souvent évoqué dans ce blog : rencontre d’une matière (humaine) et d’une forme (mécanique), s’est révélé inadapté à une demande de « jouer le jeu ».
Pourtant le but d’accélérer puis de décélérer sur une voie des usagers qui restent maîtres de la distance qui les sépare est réalisé sans grand problème dans tous les véhicules terrestres : automobile, autobus, rame de métro, train : leur plancher ne se déforme pas sous leurs pieds, la voie n’est pas élastique. On aurait pu le réaliser même avec un trottoir rapide : en se fixant comme but de transporter non des personnes, mais des sièges immobiles, comme on l’avait fait dès 1893 sur le premier trottoir roulant (fig 2) à vitesse constante, à condition cette fois d’accélérer au départ puis de décélérer à l’arrivée le plancher les supportant ; les usagers admis seraient restés assis sur ces sièges, ou debout, autorisés à se déplacer latéralement, mais pas devant ni derrière le siège, la solution la plus simple étant de placer ces sièges dans des cabines, « robots » agencés pour « jouer le jeu » ! Les réalisations correspondantes seront examinées en détail dans ce blog.
Nouveaux moyens de transport
Sautons jusqu’à 1970. Le programme Apollo touche à sa fin. Que faire du personnel pléthorique de la NASA ? Le président Nixon tente aussi de se débarrasser de la Guerre du Viet Nam. Le complexe militaro-industriel est donc sur le point de perdre ses deux principales sources de revenus. Les profits exceptionnels de ses dirigeants sont taxés à 91 % pour quelques années encore, à moins d’être investis dans la recherche, niche fiscale.
Il est urgent de trouver une activité nouvelle, utilisant ou non de nouvelles technologies, mais surtout les capacités de cette industrie en crise. La mode est à la recherche de la vitesse par des hommes pressés, pour quelques années encore. La recherche de solutions technologiques pour atteindre ce but demeurera rentable pendant quelque temps.
Le programme Apollo a produit le circuit intégré et les puces dont on sait quel a été le fulgurant avenir quelques années plus tard : l’essor de la Silicon Valley dans une toute autre direction, vers une autre civilisation ; mais Intel en 1971 ne savait que faire de son microprocesseur dont on ne voyait pas d’applications : c’était une solution qui cherchait des problèmes.
Une diversification a paru prometteuse à l’époque : beaucoup d’efforts ont été consentis par l’organisme UMTA (Urban Mass Transit Administration) pour le développement de systèmes de transport guidé automatique (AGT Automated Guided Transit) destinés au transport en masse des personnes dans les villes moyennes et les grandes banlieues des mégalopoles.
Deux concepts d’AGT ont connu à ce moment un grand succès auprès des industriels intéressés, mais aussi auprès des medias et des politiques.
1) le People Mover, convoyeur automatique de personnes, pour leur éviter une marche à pied jugée pénible, conçu soit comme un perfectionnement du trottoir roulant dont la vitesse est augmentée, soit sur le modèle des télécabines de montagne adapté à la ville et informatisé.Il a été affligé en français du nom ridicule de « transport hectométrique ». Nous utiliserons plutôt le nom anglo-saxon.
2) le Personal Rapid Transit, ou PRT, système automatique de transport dans un réseau de station à station sans arrêt intermédiaire, censé imiter l’automobile ou le taxi en fournissant « une alternative valable à leur usage dans une zone urbaine dense », lequel se ferait prétendument sans arrêts intermédiaires. Nous discuterons ce qu’il en est en réalité.
Mis au courant, Nixon déclara : — «Si nous pouvons envoyer 3 hommes sur la lune à 400000 kilomètres, nous devrions pouvoir envoyer 400000 hommes à leur lieu de travail à 3 kilomètres.»
En quoi il se trompait lourdement : l’expérience montra que c’était beaucoup plus difficile : illusion créatrice qui allait connaître un grand développement technologique, distraitement suivi par les usagers potentiels qui avaient d’autres soucis. Faute de réalisations opérationnelles, il a paru prématuré de mettre au courant le public : il les attend toujours .
Suite = > La fin du martin pécheur